Hornet 7.0 The Hornet training programme is under Team Bumblebee, which is is a student-run robotics team consisting of students from Electrical and Computer Engineering, Mechanical Engineering and Computing.
Project aim:
to build a low-cost AUV to participate in the Singapore AUV Challenge (SAUVC)
Requirements of SAUVC:
AUV navigation, visual identification, acoustic localization and robotic manipulation
My team:
Electrical team > Power subteam
My main role:
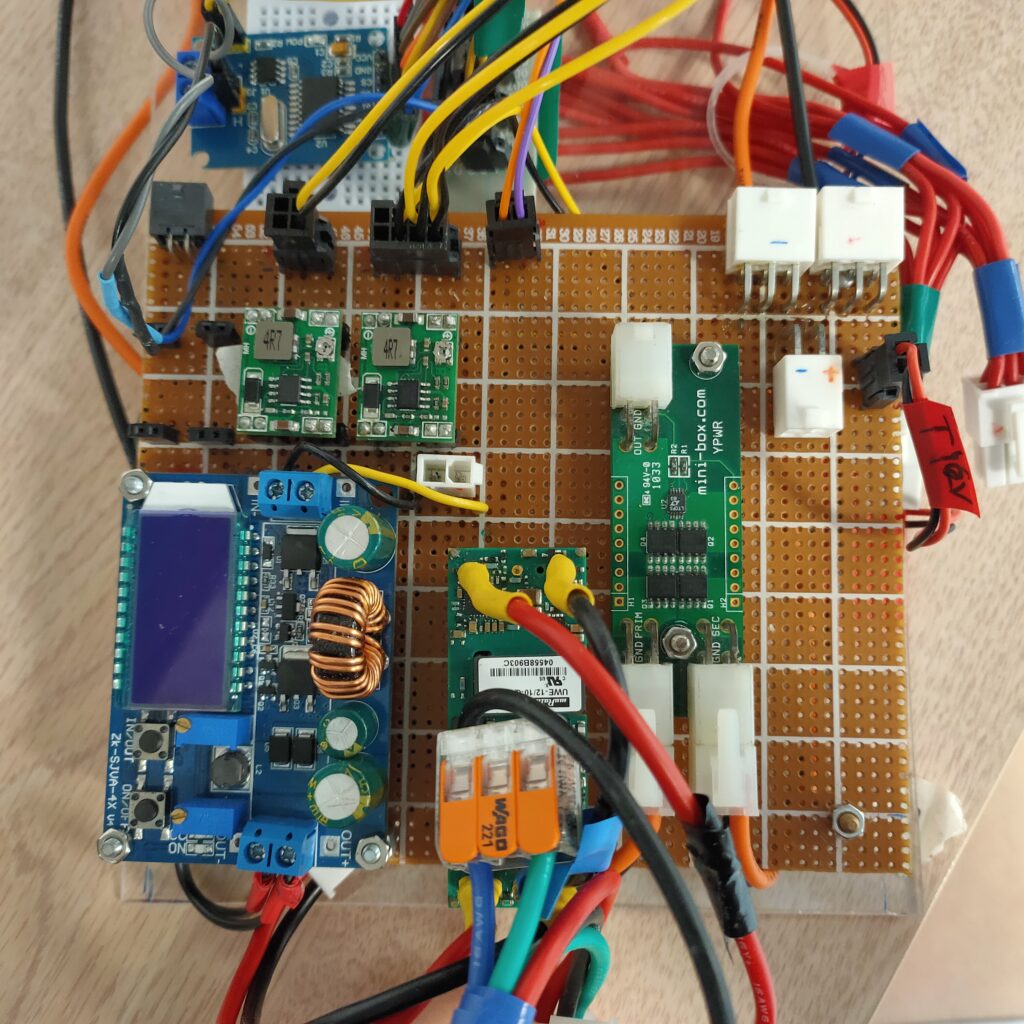
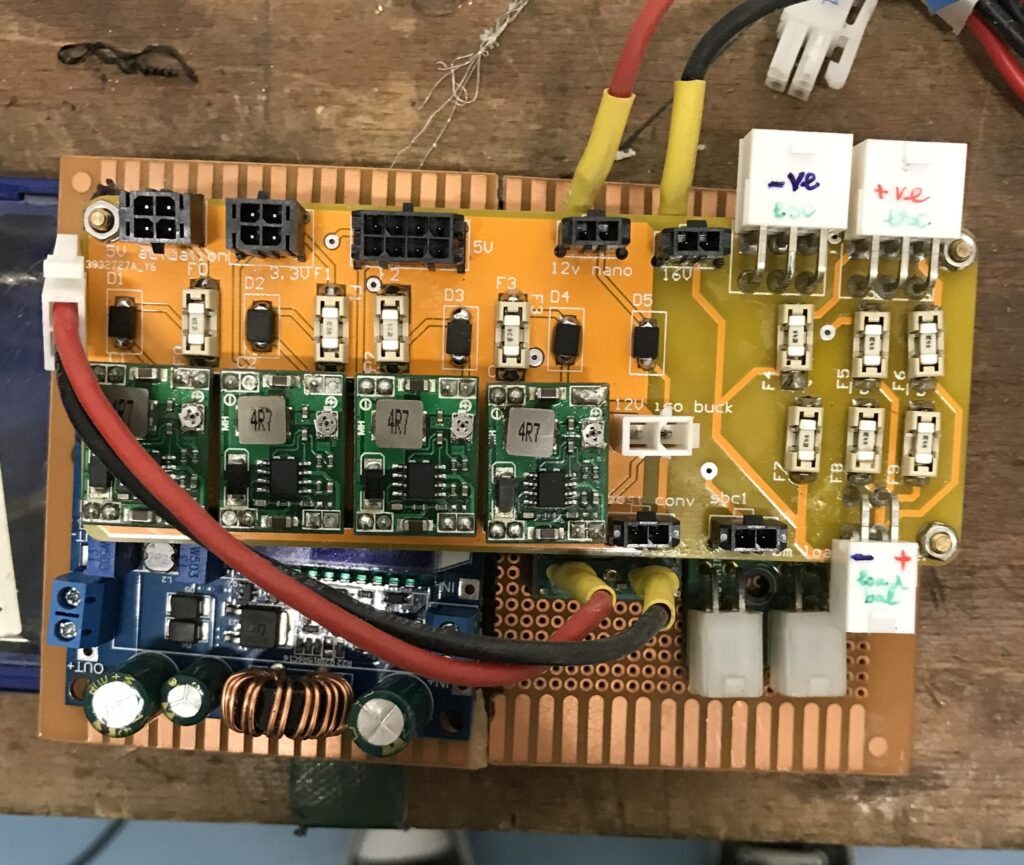
in-charged of providing power supply to rest of the components via buck and boost converters
perform power balancing to equalize the voltage and state of charge among the cells